ICT施工
ICT施工
3次元設計データをもとにICT建機をセットアップし、半自動制御により生産性と安全性を大幅に向上。進捗状況や出来形数量もリアルタイムで確認できます。
① 施工機械の種類
3DMC と 3DMG
ICT建機システムは制御方式によって2種類に大別されます。現場の要件・オペレーターのスキル・作業内容に応じて最適なシステムを選択します。
3DMC
3Dマシンコントロール
建機の作業装置を自動制御
3次元設計データと高精度な測位システム(GNSS)を組み合わせ、建設機械の操作を自動制御する最先端のシステムです。
主な特徴
- 建機の作業装置(バケットやブレード)を自動制御
- 設計データに基づく高精度な施工が可能
- オペレーターの熟練度に依存しない安定した品質
- 作業効率の大幅な向上と工期短縮
動作例(ブルドーザー):オペレーターは前後進のみを操作し、ブレードの上下は設計データに基づいて自動制御。設計通りの精密な整地が可能になります。
3DMG
3Dマシンガイダンス
オペレーターをリアルタイムでガイド
3次元設計データを活用してオペレーターをガイドする支援システムです。GNSSアンテナやIMUにより建機の位置・姿勢をリアルタイムで計測し、設計面との差分を表示します。
主な特徴
- リアルタイムでの施工ガイダンス表示
- 設計面との差分をモニターで可視化
- オペレーターの判断をサポート
- 手動操作による柔軟な施工が可能
動作例(バックホウ):キャビン内モニターに設計断面図とバケット位置関係がリアルタイム表示され、オペレーターは画面を見ながら最適な操作を行えます。
2Dシステムと3Dシステムの違い
ICT建機システムは大きく2Dと3Dの2種類があります。3Dシステムは衛星測位(GNSS)で現場全体の位置を把握できるのに対し、2Dシステムは基準点からの相対位置で制御します。現場の規模や要件に応じて最適なシステムを選択することが重要です。
3D
衛星測位(GNSS)+センサー技術
- 現場内のどこでも正確な位置情報を取得可能
- 高精度な3次元測位による施工精度の向上
- リアルタイムでの位置・姿勢情報の把握
- 天候や時間帯に影響されにくい測位が可能
2D
レーザー発信機・超音波センサー
- 基準点からの高さと距離を正確に計測
- シンプルな機器構成で導入コストを抑制
- 設置や操作が比較的容易
- 小規模現場での高い実用性
② 測位技術の種類
GNSSを利用した測位技術
GNSSを利用した測位技術は、高精度な位置情報をリアルタイムで取得でき、ICT施工において重要な役割を果たします。主に3つの方式があります。

RTK
Real Time Kinematic
基準局と移動局の2つのGNSS受信機を使用して、高精度な測位を実現する技術です。
- 数センチメートルの精度
- リアルタイムでの位置補正
- 基準局の設置が必要
- 通信環境の確保が重要
最適場面:単一現場での高精度測位。無線やモバイル通信による補正データ送信。

VRS
Virtual Reference Station
複数の電子基準点データを利用して、作業現場付近に仮想的な基準局を設置する技術です。
- 基準局の物理的な設置が不要
- 広域での利用が可能
- 携帯電話網での補正データ受信
- 月額利用料が必要
最適場面:複数現場での作業や移動しながらの測量。携帯電話網を利用したインターネット通信。

IBSS
Internet Base Station Service
インターネットを介して基準局データを配信するサービスです。既存の基準局ネットワークを活用します。
- 既存の基準局ネットワークを利用
- 安定した補正データの受信
- 複数の基準局データの利用が可能
- サービスエリア内での自由な移動
最適場面:都市部や通信インフラが整備された地域。インターネット経由のリアルタイムデータ配信。
向く現場条件
- 上空視界が良好な開けた現場
- 広範囲の施工エリア
- 複数の重機が同時稼働する現場
向かない現場条件
- 上空視界が制限される現場
- 電波障害が予想される現場
- 精密な施工が必要な現場
現場条件の事前調査
衛星の捕捉状況、電波環境、障害物の有無を確認。季節や時間帯による衛星配置の変化も考慮。
必要精度と現場環境の適合性確認
要求精度を満たせる環境か事前検証。GNSS不適環境ではTS等の代替測位手段も検討。
測位技術の選定ポイント
単一現場ならRTK、複数現場ならVRS/IBSSが適切。携帯電話網・インターネット接続の可否も確認。
運用コストの検討
初期費用と月額費用のバランスを考慮した選択。現場の規模・期間に応じた最適プランを検討。
TS(杭ナビ等)を利用した測位技術
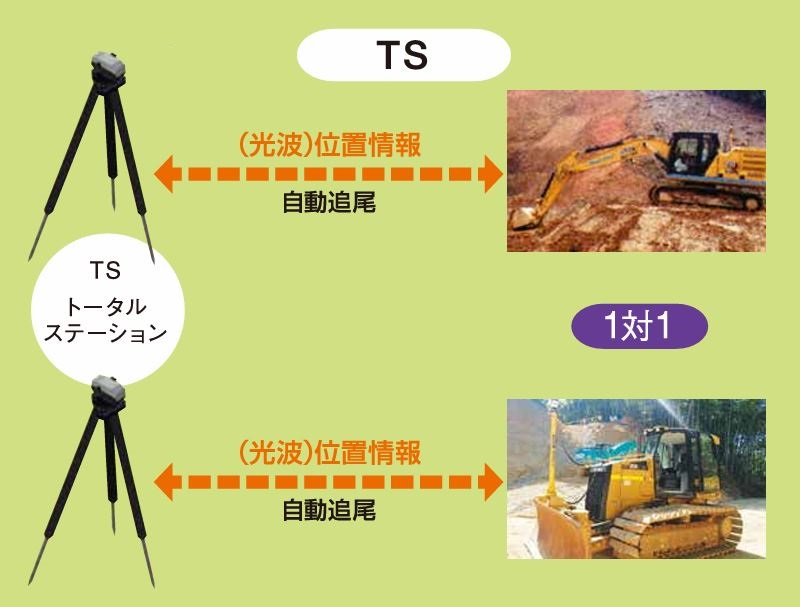
自動追尾TS
トータルステーション(TS)を利用した測位技術は、プリズムを自動追尾することで高精度な位置情報をリアルタイムで取得します。GNSSが使用できない環境でも安定した測位が可能です。
主な特徴
- ミリメートル単位の高精度な測位が可能
- トンネルや高層ビル街など、GNSS不感地域でも使用可能
- 気象条件の影響を受けにくい
- 自動追尾機能により連続的な位置計測が可能
注意点
- TSと建機間の視通の確保が必要(障害物による遮断を避ける設置計画)
- 通常300m程度を目安に施工範囲に応じた適切な設置位置を選定
- 定期的なキャリブレーションによる精度維持
- 霧や雨などの視界不良時の代替手段を確保
③ ICT建機レンタル導入の流れ
5ステップで現場稼働まで
機種選定から現場でのアフターフォローまで、志摩機械がトータルでサポートします。
1
機種選定
測量方法
- UAV写真測量
- 地上型レーザースキャナー
- 従来測量(ICT無し)
ICT建機
- バックホウ
- ブルドーザー
- ローラー
- モーターグレーダー
測位方法
- RTK-GNSS
- VRS
- IBSS
- 自動追尾型TS
2
必要なデータの種類
平面図データ(.dwg / .dxf)
- 現況平面図データ
- 計画平面図データ
基準点データ(.csv / .txt)
- 既知点座標データ
- ローカライゼーションデータ
3次元設計データ(.xml / .landxml)
- 発注図面からの3次元モデル作成
- 座標系と単位系の確認
3
ローカライゼーション
基準局の設置
- 最適な設置位置の選定
- 電源と通信環境の確保
座標系の設定・現場座標変換
- 現場座標系の設定・基準点データ入力
- 座標変換パラメータの算出と設定
- 高さ補正値の設定
4
ICT建設機械の導入
システムのセットアップ
- 既知点での座標確認
- 3次元設計データの取込み
- キャリブレーション
- システム全体の精度検証
基本操作・安全管理
- 起動と終了手順
- モニター画面の見方・各種モード切替
- システム使用時の注意点
- 安全機能の確認方法
実機を使用した実践的な研修を実施し、現場での運用をスムーズに開始できるようサポートします。
5
アフターフォロー
施工状況の確認
- 施工精度の確認
- 作業効率の分析
システムの最適化
- 運用状況に応じた設定調整
- 精度管理のサポート
技術的なアドバイス
- 操作方法の改善提案
- 新機能の活用方法
- 定期的な精度確認
導入後も継続的なサポートを提供し、ICT施工の効果を最大限に引き出せるよう支援します。
導入に関する注意事項
事前の現場環境調査
GNSS受信状況、電波障害要因の確認が重要です。
データ準備時間の確保
3次元データ作成・変換作業のリードタイムを考慮してください。
通信環境の整備
基準局〜移動局間の通信、データ転送環境の整備が必要です。
定期的なメンテナンス
センサー類の点検、システム更新の確認を定期的に実施してください。